第二章 第一节 运动副及其分类
第二章 平面机构
【自学目的】:
1、了解课程的性质与内容,能根据实物绘制机构运动简图
2、熟练掌握机构自由度计算方法。了解机构组成原理
【自学重点及处理方法】:
1、机构及运动副的概念、绘机构运动简图
2、自由度计算
第一节 运动副及其分类
一、运动副:
构件间的可动联接。(既保持直接接触,又能产生一定的相对运动)
高副:点线接触
低副:面接触
运动副元素
自由度:构件含有独立运动的数目
约束:对独立运动的限制
低副:2个约束,1个自由度
高副:1个约束,2个自由度
低副:
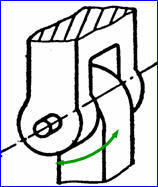 ①转动副:两个构件间不能作旋转运动的运动副;
①转动副:两个构件间不能作旋转运动的运动副;
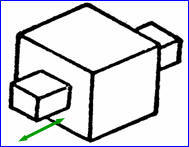 ②移动副:两个构件间不能作移动运动的运动副。
②移动副:两个构件间不能作移动运动的运动副。
高副:①齿轮副;②凸轮副。
二、运动链、机构
1、运动链:两个以上构件通过运动副联接而成的系统
①平面运动链;②空间运动链
(根据各构件间的相对运动为平面运动还是空间运动分类)
2、机构(从运动链角度):
1、对一个运动链
2、选一构件为机架
3、确定原动件(一个或数个)
4、原动件运动时,从动件有确定的运动。
|
四川机电职业技术学院机械工程系 四川省攀枝花市 (0812)6251577 |