第二章 第三节 平面机构的自由度
机构的自由度:机构中各构件相对于机架所能有的独立运动的数目。
一、计算机构自由度(设n个活动构件,PL个低副,PH个高副)
![]()
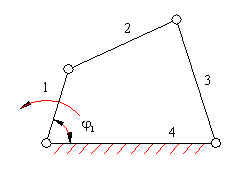
二、机构具有确定运动的条件
(原动件数>F,机构破坏)
![]()
原动件数=机构自由度
铰链五杆机构:
![]()
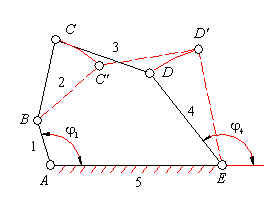
原动件数<机构自由度数,机构运动不确定(任意乱动)
![]()
构件间没有相对运动机构→刚性桁架
![]()
(多一个约束)超静定桁架
F≤0,构件间无相对运动,不成为机构。
F>0, 原动件数=F,运动确定
原动件数<F,运动不确定
原动件数>F,机构破坏
三、计算F时注意问题
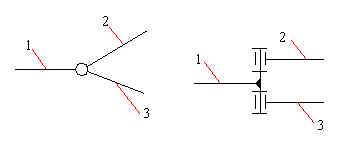
(1)复合铰链
m-1
例:![]()
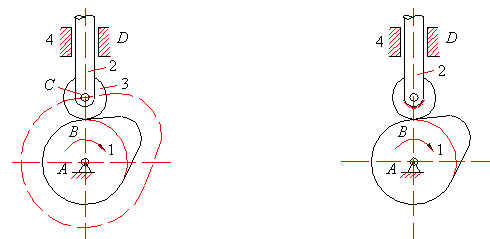
(2)局部自由度
(与输出件运动无关的自由度称局部自由度)
![]()
![]()
(3)虚约束:
在特殊的几何条件下,有些约束所起的限制作用是重复的,这种不起独立限制作用的约束称为虚约束。
![]()
![]()
平面机构的虚约束常出现于下列情况:
(1)不同构件上两点间的距离保持恒定……
(2)两构件构成各个移动副且导路互相平行
(3)两构件构成各个转动副且轴线互相重合……
(4)在输入件与输出件之间用多组完全相同的运动链来传递运动……
例:计算自由度
(先看有无注意事项,复合铰链……,再看有几个构件)
![]()
1、![]()
2、![]() ,其中B、C为复合铰链。
,其中B、C为复合铰链。
|
四川机电职业技术学院机械工程系 四川省攀枝花市 (0812)6251577 |